概要
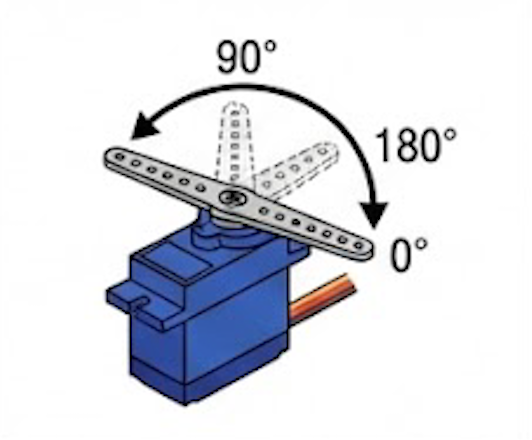
このレッスンでは、**サーボモーター**を制御する方法を学びます。サーボはギアードモーターの一種で、通常180度しか回転できませんが [1]、RobotLinking Unoボードから電気パルスを送ることで制御されます [1]。このパルスによって、サーボは移動すべき位置を指示されます [1]。
サーボには3本のワイヤーがあります。茶色のワイヤーがGND、赤色のワイヤーがVCC、そしてオレンジ色のワイヤーが信号線です [1]。
🛠️ 必要な部品
このプロジェクトを進めるために、以下の部品を準備してください [2]。
- RobotLinking Uno board : 1個 [2]
- USB data cable : 1本 [2]
- Servo (サーボモーター) : 1個 [2]
- Jumper wires (ジャンパーワイヤー) : 数本 [2]
実験原理 (Principle)
サーボは、シェル、回路基板、ノンコアモーター、ギア、および位置検出機構で構成されています [2]。
動作原理は以下の通りです。RobotLinking UnoボードがサーボモーターにPWM信号を送信します [2]。この信号は回路基板上のICによって処理され、回転方向が計算されモーターを駆動します [2]。この駆動力が減速ギアによってスイングアームに伝達されます [3]。同時に、位置検出器が位置信号を返し、設定された位置に到達したかどうかを判断します [3]。
⚙️ 実践手順 (Experimental Procedures)
- 回路の接続以下の図を参考に回路を接続します [3]。(ここに回路図の画像または図の記述を挿入)
- プログラムの作成プログラムを作成します(CDまたは公式ウェブサイトのサンプルコードを参照してください) [3]。
- プログラムのコンパイルプログラムをコンパイルします [3]。
- プログラムの書き込みプログラムをRobotLinking Unoボードに書き込みます [3]。
✅ 確認
サーボモーターが**90度回転し(15度ずつ回転)** [3]、その後、逆方向に回転するのを確認できるはずです [3]。